|
|
|
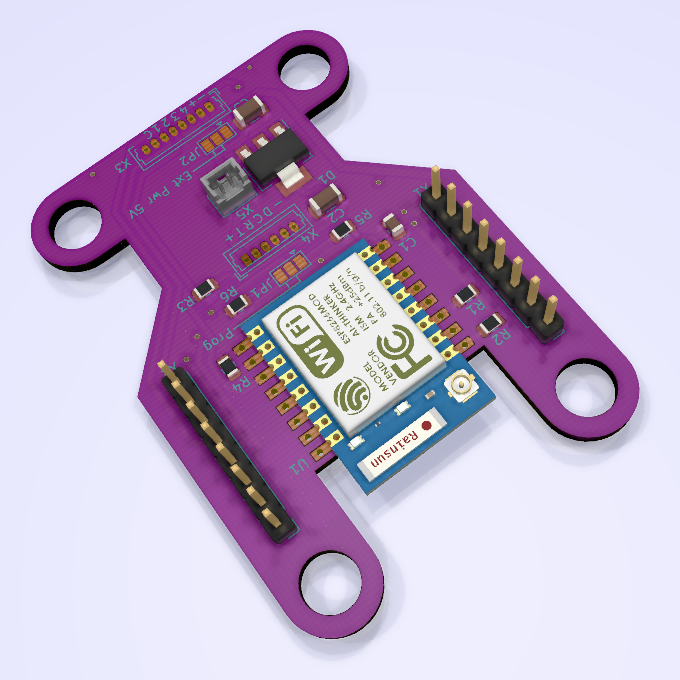
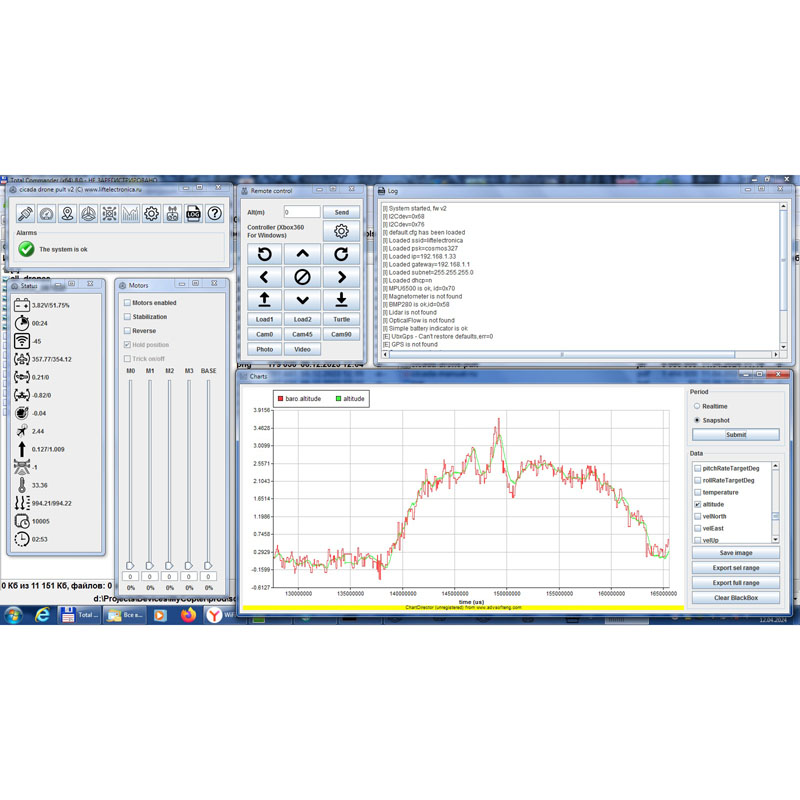
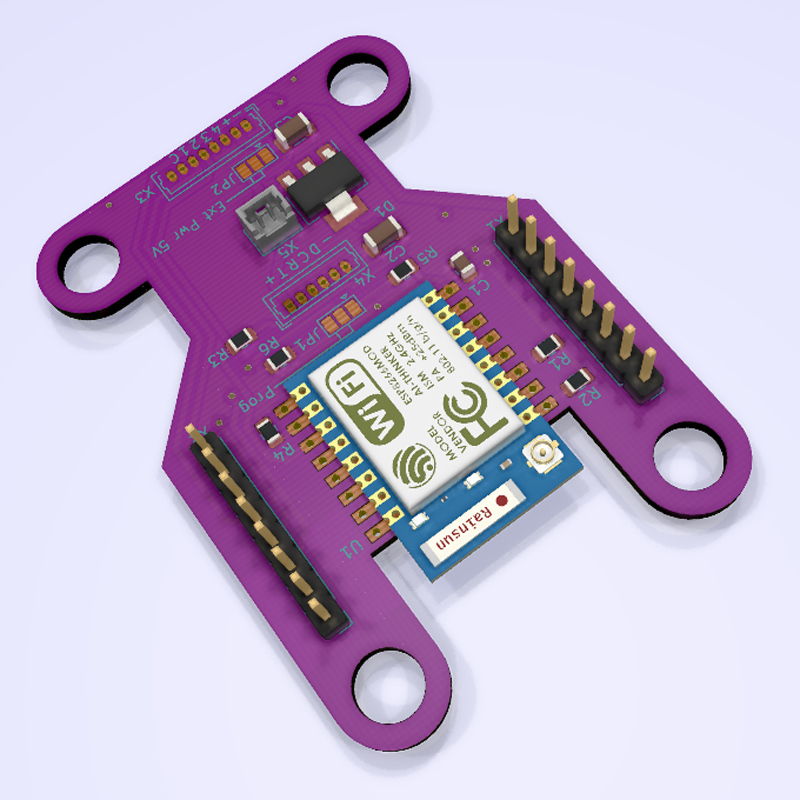
WiFi полётный контроллер Cicada на базе ESP8266Полётный контроллер Cicada предназначен для управления квадрокоптерами. Отличительной особенностью данного полётного контроллера является канал управления и телеметрии по WiFi сети, что позволяет управлять квадрокоптером с ноутбука или смартфона. Для этого разработаны десктоп-приложение на Java и мобильное приложение для Android v7 и выше. Данный полётный контроллер будет интересен для новичков, так как позволяет создать свой первый квадрокоптер за минимальные деньги. Не нужно покупать отдельный пульт управления и приёмник, что экономит деньги. А также полётный контроллер выполнен из легкодоступных и не дорогих деталей. При наличии навыков пайки данный полётный контроллер можно изготовить самостоятельно. Открытые исходные коды будут интересны другим разработчикам и исследователям. Легко можно самостоятельно добавить в прошивку поддержку нового датчика, тем самым исследовать поведение нового датчика и потом полученные наработки перенести на свои модели. Плата сicada-main-v4Главная плата. Содержит модуль ESP8266, схему питания и разъёмы для подключения платы расширения. Предназначена для установки на квадрокоптеры с модулями GPS, PMW3901, лидаром и питанием от АКБ с напряжением выше 6,8В.
Плата сicada-micro-v2Главная плата. Содержит модуль ESP8266, схему питания и модуль IMU. Предназначена для установки на микроквадрокоптеры или любые другие квадрокоптеры с модулем GPS и без него.
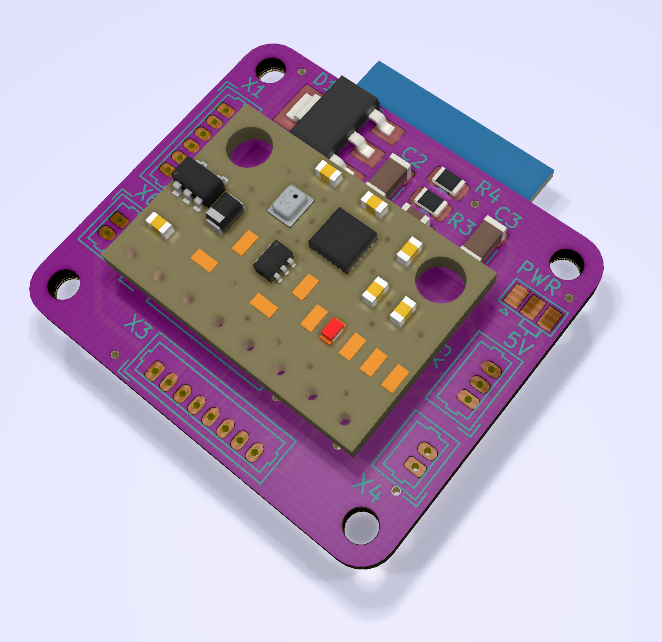
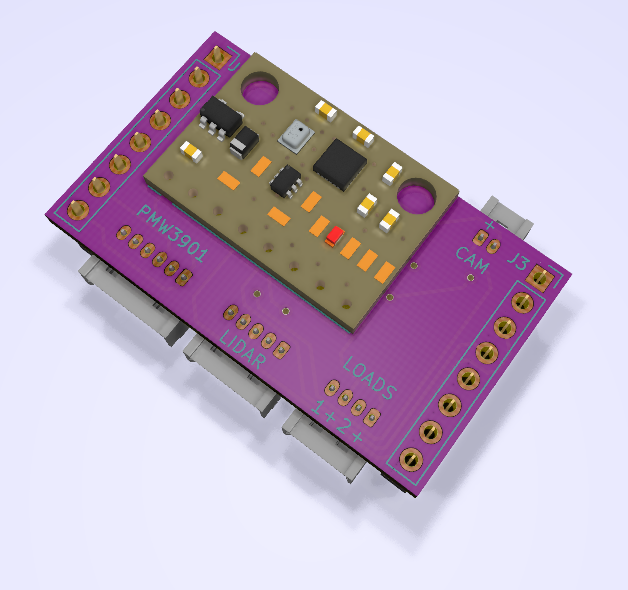
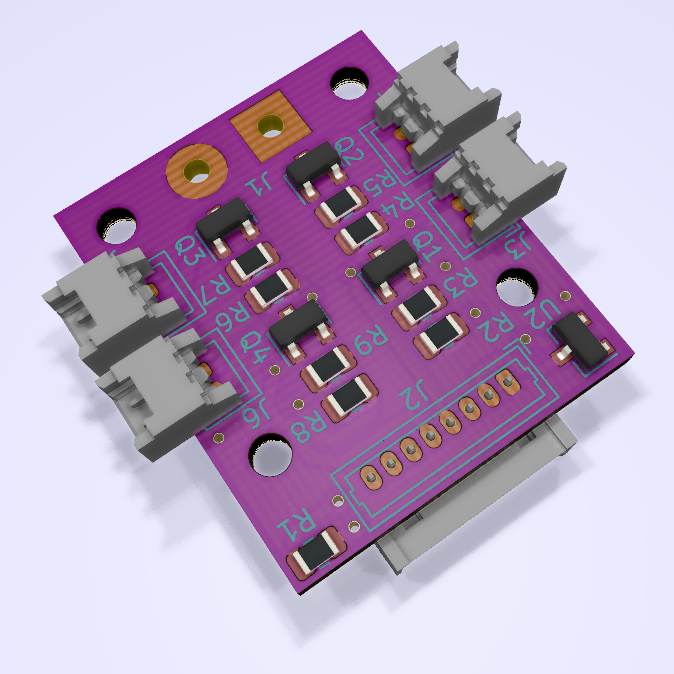
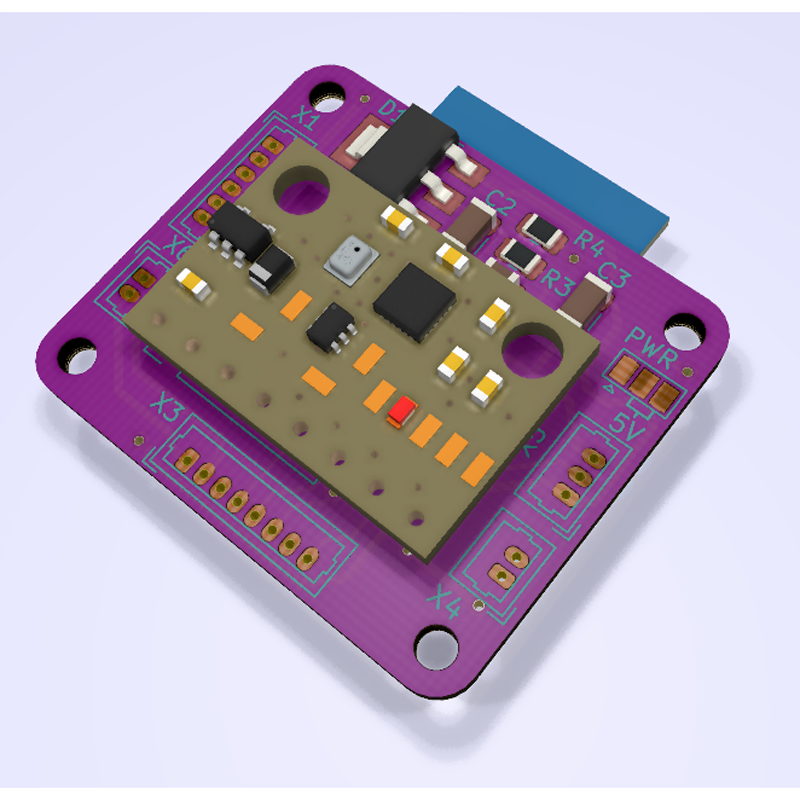
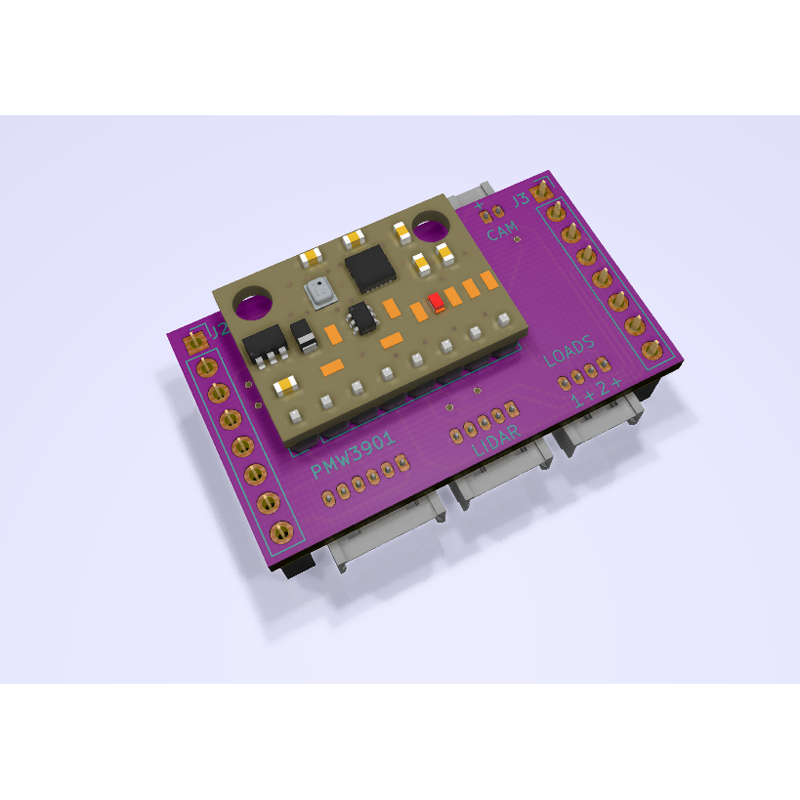
Плата расширения cicada-gy91-v3Данная плата расширения построена на базе модуля GY-91 (MPU9250+BMP280) поддерживает подключение датчиков тока, лидара, оптического датчика смещения, двух нагрузок (управляемых устройств, например, buzzer, led и пр.) и есть разъём питания для FPV-камеры на 5В.
Плата cicada-pwm-esc-v3Данная плата предназначена для подключения коллекторных моторов типа Coreless 816, 8520, 1020 и других.
Скачать руководство пользователя v1.0 Скачать Release v2 Файлы релиза содержат gerber-файлы для изготовления всех печатных плат, схемы электрические принципиальные, расположение компонентов на плате, установочный файлы десктоп-приложения, *.apk файл андроид приложения, 3d модели для печати деталей корпуса.
Смотреть демо-видео
Технические характеристики:
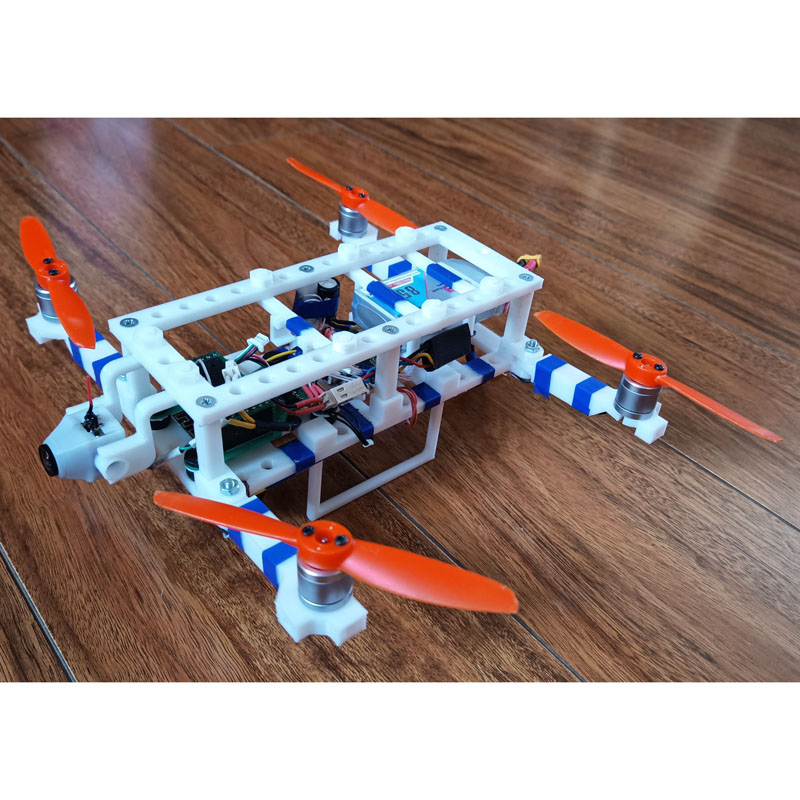
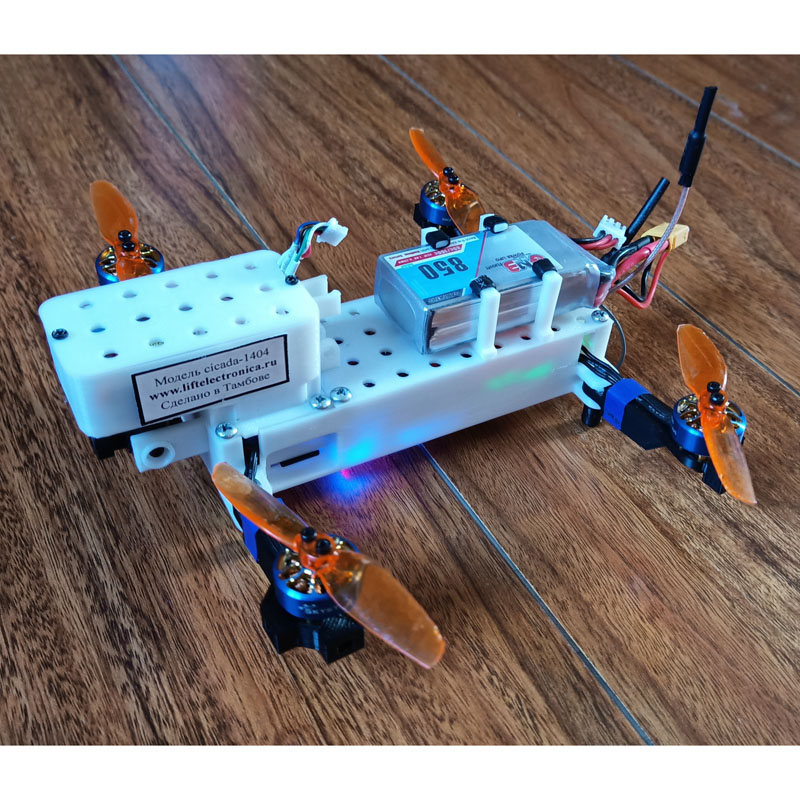
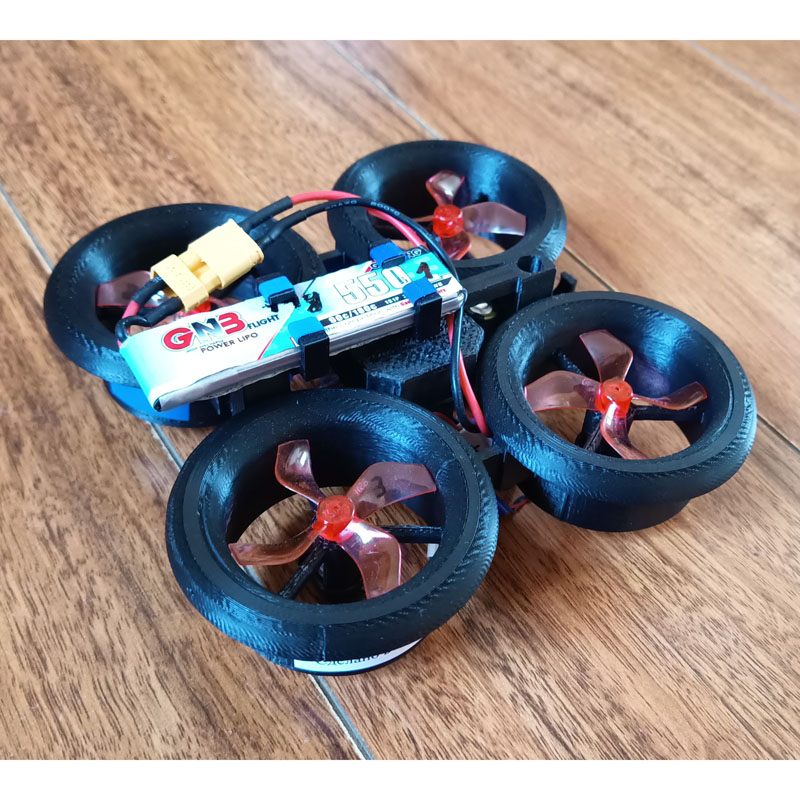
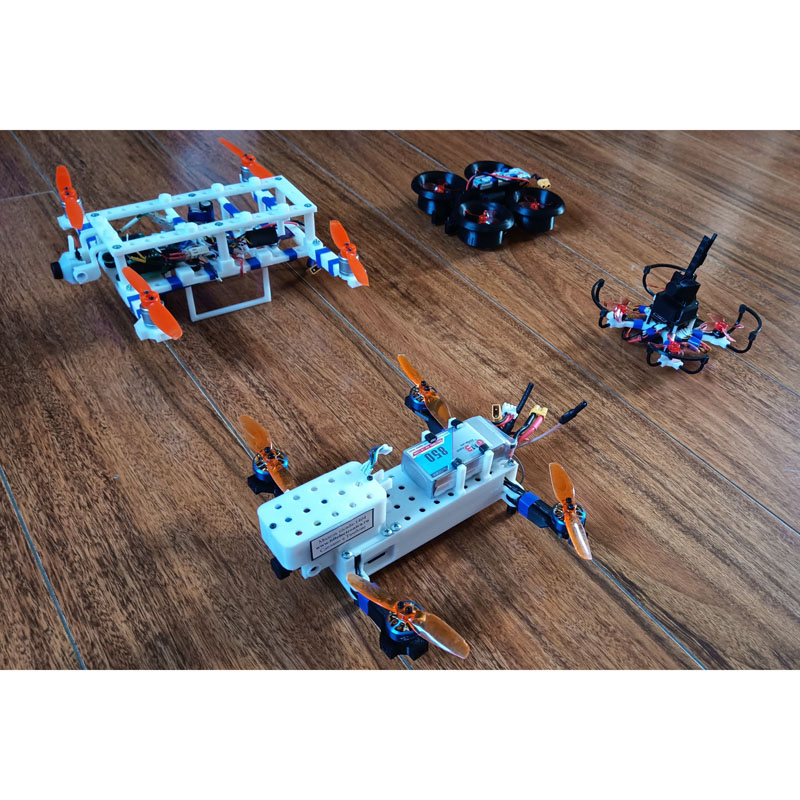
Примеры квадрокоптеровКвадрокоптер Cicada-1106 с бесколлекторными моторами 1106 и пропеллерами 4045x2, датчиками GPS, Lidar, Optical Flow. Предназначен для полётов на открытом воздухе, имеет функцию автоматического торможения и удержания позиции. Квадрокоптер Cicada-1404 c бесколлекторными моторами 1404 и пропеллерами 3020x2. Квадрокоптер Cicada-0802 микроквадрокоптер для полётов внутри помещения с бесколлекторными моторами 0802 и пропеллерами 1610x3 Квадрокоптер Cicada-0816df микроквадрокоптер для полётов внутри помещения на коллекторных двигателях 816 Как заказать?Устройство предназначено для самостоятельного изготовления для личных целей. Все исходные коды и файлы для сборки печатной платы открыты.ЛицензияДля программного обеспечения GNU GPLv3 Для электроники CERN OHL v2 Weakly Reciprocal Поддержать проектЕсли вам понравился проект Cicada, то вы можете угостить автора чашечкой кофе, отправив донат по ссылке или по QR-коду.
Автор - инженер Антон Сысоев, город Тамбов
|




©Индивидуальный предприниматель Сысоев Антон Сергеевич. Тамбов 2010 - 2026